
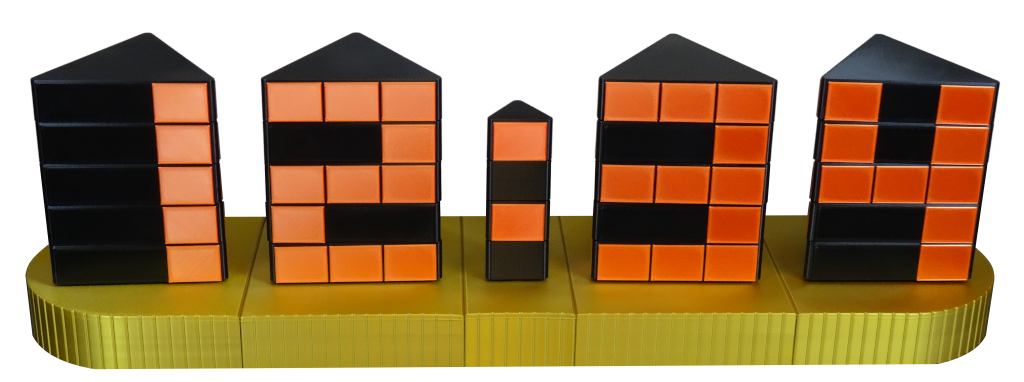
Time Tinter
Time Tinter

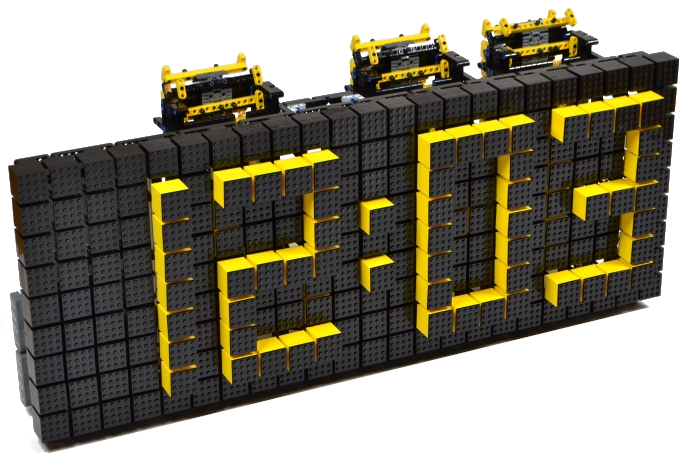
Time Slider

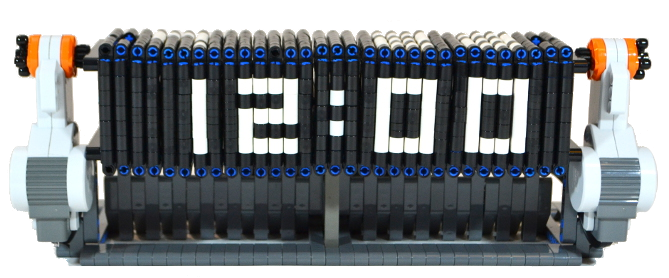
O-Clock
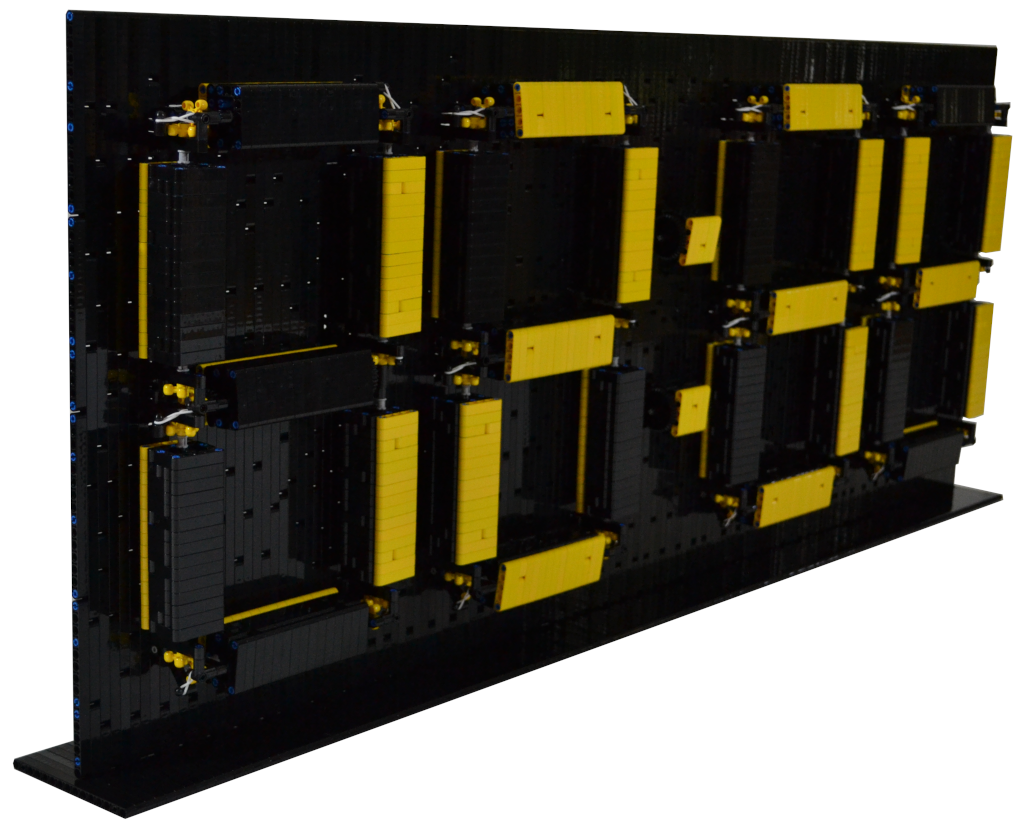
Time Twister 5
Time Twister 4
Time Twister 3
Time Twister 2

Time Twister

Tilted Twister 2.0
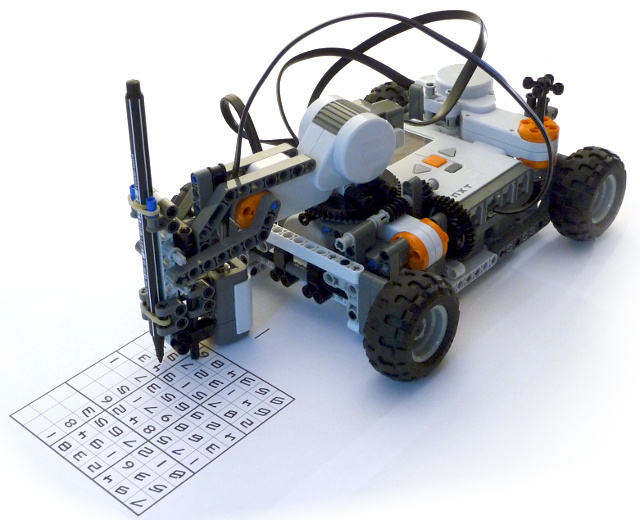
Sudoku Solver

Tilted Twister
Built with Mobirise - Find more